
Mradi huu unaeleza jinsi motor ya DC inaweza kusogezwa mbele au kurudi nyuma kwa kutumia TV au DVD ya kidhibiti cha mbali.Lengo ni kutengeneza kiendeshi rahisi cha injini inayoelekeza pande mbili inayotumia moduli ya moduli ya moduli ya infrared (IR) 38kHz kwa madhumuni haya bila kutumia kidhibiti kidogo au upangaji programu.
Mfano wa mwandishi umeonyeshwa kwenye Mchoro 1.

Mzunguko na kazi
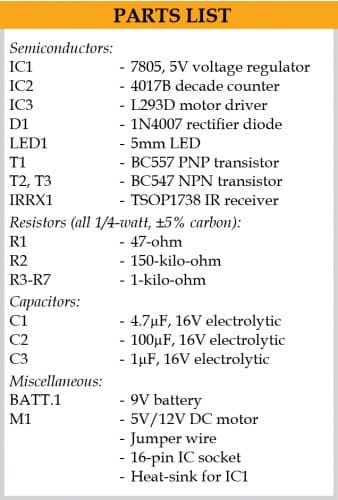
Mchoro wa mzunguko wa mradi umeonyeshwa kwenye Mchoro wa 2. Imejengwa karibu na moduli ya kipokeaji cha IR TSOP1738 (IRRX1), kaunta ya muongo 4017B (IC2), dereva wa gari L293D (IC3), PNP transistor BC557 (T1), transistors mbili za BC547 NPN ( T2 na T3), usambazaji wa umeme unaodhibitiwa na 5V (IC1), na betri ya 9V.
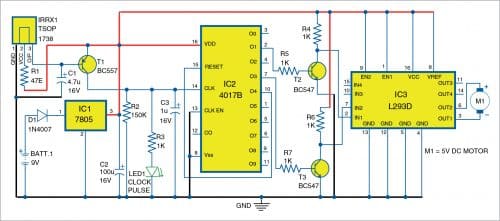
Betri ya 9V imeunganishwa kupitia diode D1 hadi kidhibiti cha voltage 7805 ili kuzalisha 5V DC inayohitajika kwa mradi huo.Capacitor C2 (100µF, 16V) inatumika kukataliwa kwa ripple.
Katika hali ya kawaida, pini ya pato 3 ya moduli ya IR IRRX1 iko katika kiwango cha juu cha kimantiki, ambayo ina maana kwamba transistor T1 iliyounganishwa nayo imekatwa na hivyo terminal yake ya mkusanyaji iko chini kimantiki.Mkusanyaji wa T1 huendesha mdundo wa saa ya kukabiliana na IC2 ya muongo.
Inapoelekeza kidhibiti cha mbali kuelekea moduli ya IR na kubonyeza kitufe chochote, moduli hupokea mipigo ya IR 38kHz kutoka kwa kidhibiti cha mbali.Mipigo hii hugeuzwa kwenye kikusanya T1 na kupewa pini ya pembejeo ya saa 14 ya kaunta IC2 ya muongo.
Mipigo ya IR inayowasili huongeza kihesabu cha muongo kwa kiwango sawa (38kHz) lakini kwa sababu ya kuwepo kwa kichujio cha RC (R2=150k na C3=1µF) kwenye pini ya saa ya 14 ya IC2, mlolongo wa mipigo huonekana kama mpigo mmoja. kaunta.Kwa hivyo, kwa kubonyeza kila kitufe, kaunta husonga mbele kwa hesabu moja pekee.
Wakati ufunguo wa kidhibiti cha mbali unapotolewa, capacitor C3 hutoka kupitia resistor R2 na mstari wa saa inakuwa sifuri.Kwa hivyo kila mtumiaji anapobonyeza na kuachilia kitufe kwenye kidhibiti cha mbali, kaunta hupokea mpigo mmoja kwenye ingizo la saa yake na taa ya LED1 ili kuthibitisha kuwa mpigo umepokewa.
Wakati wa operesheni kunaweza kuwa na uwezekano tano:
Kesi ya 1
Wakati ufunguo wa kidhibiti cha mbali unapobonyezwa, mpigo wa kwanza hufika na matokeo ya O0 ya kaunta ya muongo (IC2) hupanda juu huku pini O1 hadi O9 ziko chini, kumaanisha transistors T2 na T3 ziko katika hali ya kukatika.Watoza wa transistors zote mbili huvutwa hadi hali ya juu na vipinga vya 1-kilo-ohm (R4 na R6), kwa hivyo vituo vyote vya kuingiza IN1 na IN2 vya dereva wa gari L293D (IC3) huwa juu.Katika hatua hii, motor iko katika hali ya mbali.
Kesi ya 2
Kitufe kinapobonyezwa tena, mpigo wa pili unaofika kwenye mstari wa CLK huongeza kihesabu kwa moja.Hiyo ni, wakati pigo la pili linafika, pato la O1 la IC2 huenda juu, wakati matokeo yaliyobaki ni ya chini.Kwa hivyo, transistor T2 inaendesha na T3 imekatwa.Inayomaanisha kuwa voltage kwenye kikusanyaji cha T2 hupungua (IN1 ya IC3) na voltage kwenye mtozaji wa T3 inakuwa ya juu (IN2 ya IC3) na pembejeo IN1 na IN2 ya kiendeshi cha IC3 inakuwa 0 na 1, mtawalia.Katika hali hii, motor huzunguka katika mwelekeo wa mbele.
Kesi ya 3
Kitufe kinapobonyezwa kwa mara nyingine tena, mpigo wa tatu unaofika kwenye mstari wa CLK huongeza kihesabu kwa moja tena.Kwa hivyo matokeo ya O2 ya IC2 huenda juu.Kwa vile hakuna chochote kilichounganishwa kwenye pini ya O2 na pini za pato O1 na O3 ziko chini, kwa hivyo transistors zote mbili T2 na T3 huenda kwenye hali ya kukatwa.
Vituo vya wakusanyaji vya transistors zote mbili huvutwa hadi hali ya juu na vipingamizi vya 1-kilo-ohm R4 na R6, ambayo ina maana ya vituo vya kuingiza IN1 na IN2 vya IC3 kuwa vya juu.Katika hatua hii, motor iko katika hali ya mbali tena.
Kesi ya 4
Kitufe kinapobonyezwa kwa mara nyingine, mpigo wa nne unaofika kwenye mstari wa CLK huongeza kihesabu kwa moja kwa mara ya nne.Sasa pato la O3 la IC2 linakwenda juu, wakati matokeo yaliyobaki ni ya chini, hivyo transistor T3 hufanya.Ambayo ina maana voltage katika mtoza wa T2 inakuwa ya juu (IN1 ya IC3) na voltage kwenye mtoza wa T3 inakuwa ya chini (IN2 ya IC3).Kwa hivyo, pembejeo IN1 na IN2 za IC3 ziko katika viwango vya 1 na 0, mtawalia.Katika hali hii, motor huzunguka kwa mwelekeo wa nyuma.
Kesi ya 5
Kitufe kinapobonyezwa kwa mara ya tano, mpigo wa tano unaofika kwenye mstari wa CLK huongeza kihesabu kwa moja tena.Kwa kuwa O4 (pini 10 ya IC2) imeunganishwa kwa waya ili Kuweka upya pini ya 15 ya IC2, kubonyeza kwa mara ya tano hurejesha kaunta kumi kwenye hali ya kuwasha upya ikiwa na O0 ya juu.
Kwa hivyo, mzunguko hufanya kazi kama dereva wa mwelekeo wa pande mbili ambao unadhibitiwa na udhibiti wa mbali wa infrared.
Ujenzi na upimaji
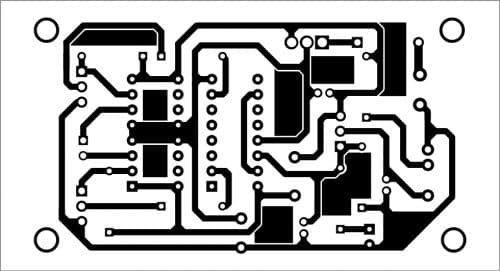
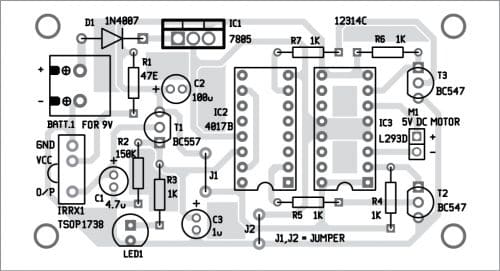
Saketi inaweza kukusanywa kwenye Veroboard au PCB ambayo mpangilio wake wa ukubwa halisi umeonyeshwa kwenye Mchoro 3. Mpangilio wa vipengele vya PCB umeonyeshwa kwenye Mchoro 4.
Pakua PCB na PDF za muundo wa Sehemu:Bonyeza hapa
Baada ya kuunganisha mzunguko, unganisha betri ya 9V kwenye BATT.1.Rejelea Jedwali la Ukweli (Jedwali la 1) kwa ajili ya uendeshaji na ufuate hatua zilizoelezwa katika Kesi ya 1 hadi Kesi ya 5 hapo juu.
Imeandaliwa na Lisa
Muda wa kutuma: Sep-29-2021